相关文章

分布式系统中的 ActiveMQ:异步解耦与流量削峰(二)
四、流量削峰
(一)流量削峰原理深入解析
在当今互联网应用中,高并发场景屡见不鲜 。例如,电商平台的促销活动、在线票务系统的抢票时刻以及社交平台的热点事件爆发期等,都会在短时间内迎来大量用户请求。这些瞬间涌入…
编程日记
2026/4/12 17:14:09
金融企业如何借力运维监控强化合规性建设?
日前,国家金融监督管理总局网站公布行政处罚信息,认定某银行存在多项违规并对其进行罚款。其中,国家金融监督管理总局认定该银行主要违规内容包括: 一、部分重要信息系统识别不全面,灾备建设和灾难恢复能力不符合监管要…
编程日记
2026/5/5 9:33:57
Vite 的工作流程
Vite 的工作流程基于其创新的 “预构建 按需加载” 机制,通过利用现代浏览器对原生 ES 模块的支持,显著提升了开发效率和构建速度。以下是其核心工作流程的详细分析: 一、开发环境工作流程
1. 启动开发服务器
冷启动:通过 npm …
编程日记
2026/5/2 3:40:46
SDC命令详解:使用get_ports命令进行查询
相关阅读
SDC命令详解https://blog.csdn.net/weixin_45791458/category_12931432.html?spm1001.2014.3001.5482 get_ports命令用于创建一个端口对象集合,关于设计对象和集合的更详细介绍,可以参考下面的博客。需要注意的是,在有些工具中还存…
编程日记
2026/5/9 12:38:53
关于Docker拉取镜像超时/无法访问镜像仓库解决方案
文章目录 关于Docker拉取镜像超时/无法访问镜像仓库解决方案卸载原先安装的Docker及相关配置使用代理后无法拉取镜像解决方案验证代理连通性安装 Docker 最新版配置 Docker Daemon HTTP 代理重启验证与拉取镜像 不使用代理解决方案安装 Docker 最新版配置阿里云容器镜像加速 关…
编程日记
2026/5/7 19:41:00

Ubuntu20.04安装使用ROS-PlotJuggler
Ubuntu20.04安装使用ROS-PlotJuggler 安装PlotJuggler使用Plotjuggler 写在前面,先确保安装了ROS-Noetic,如果没有安装,可通过以下程序一键安装:
wget http://fishros.com/install -O fishros && . fishros安装PlotJuggl…
编程日记
2026/5/11 22:49:30
![[蓝桥杯真题题目及解析]2025年C++b组](https://i-blog.csdnimg.cn/direct/b4e51bee5a104ae1bcd4a7adcaa4189b.png)
[蓝桥杯真题题目及解析]2025年C++b组
移动距离(填空)**
小明初始在二维平面的原点,他想前往坐标 (233,666)。在移动过程中,他只能采用以下两种移动方式,并且这两种移动方式可以交替、不限次数地使用:
水平向右移动,即沿着 x 轴正方…
编程日记
2026/5/12 16:49:01
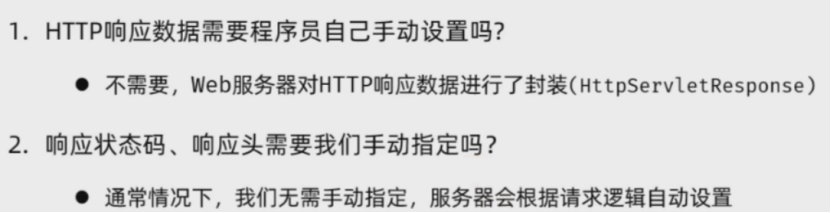
JavaWeb:后端web基础(TomcatServletHTTP)
一、今日内容 二、Tomcat
介绍与使用
介绍 基本使用 小结 配置
配置 查找进程 三、Servlet
什么是Servlet 快速入门
需求 步骤 1.新建工程-模块(Maven) 2.修改打包方式-war 3.编写代码
/*** 可以选择继承HttpServlet*/
WebServlet("/hello&q…
编程日记
2026/5/5 21:12:52

