相关文章

人工智能工程师学习路线总结(下)
目录
人工智能工程师学习路线总结(下)
十、深度学习框架进阶
(一)TensorFlow分布式训练
(二)PyTorch模型优化
十一、自然语言处理(NLP)进阶
(一)Transf…
编程日记
2025/11/25 2:13:44
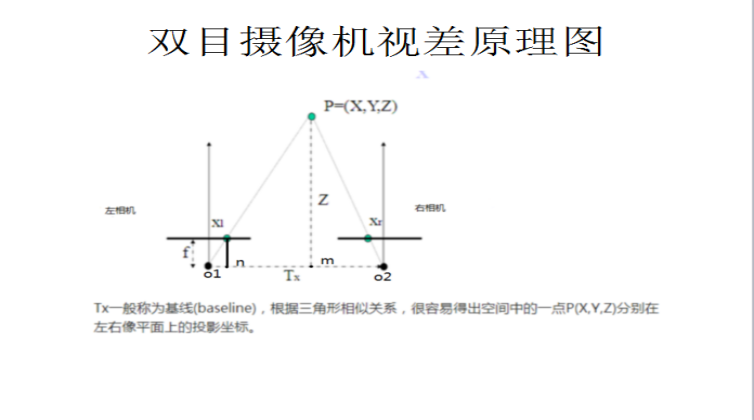
机器视觉6-halcon高级教程
机器视觉6-halcon高级教程 双目立体视觉原理视差外极线几何双目标定 双目立体视觉之Halcon标定一.标定结果二.Halcon标定过程1.获取左右相机图像中标定板的区域;2.提取左右相机图像中标定板的MARK点坐标和摄像机外部参数;3.执行双目标定;4.获取非标准外极线几何到标…
编程日记
2025/12/24 4:39:33
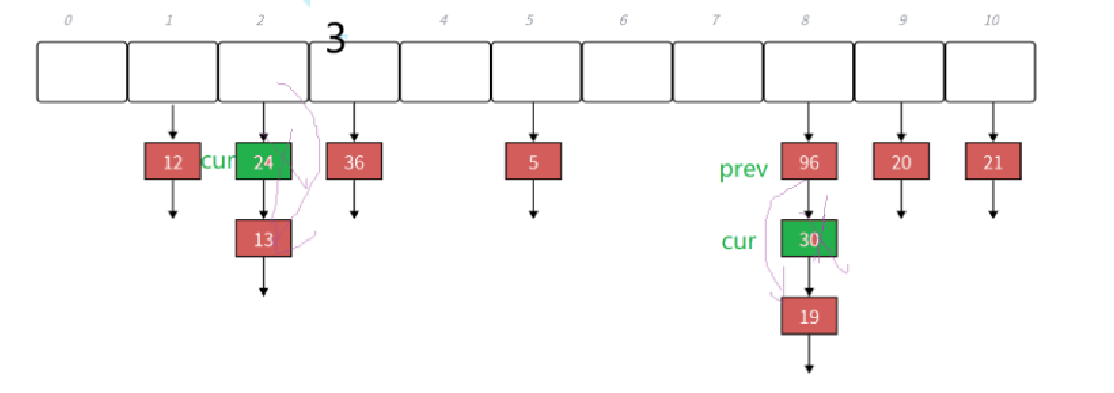
高阶数据结构——哈希表的实现
目录 1.概念引入
2.哈希的概念:
2.1 什么叫映射?
2.2 直接定址法
2.3 哈希冲突(哈希碰撞)
2.4 负载因子
2.5 哈希函数
2.5.1 除法散列法(除留余数法)
2.5.2 乘法散列法(了解)…
编程日记
2025/12/18 16:46:46
Java基础 Day19
一、泛型(JDK5引入)
1、基本概念
在编译阶段约束操作的数据类型,并进行检查
好处:统一数据类型,将运行期的错误提升到了编译期
泛型的默认类型是 Object
2、泛型类
在创建类的时候写上泛型
在创建具体对象的时候…
编程日记
2025/12/24 6:18:28
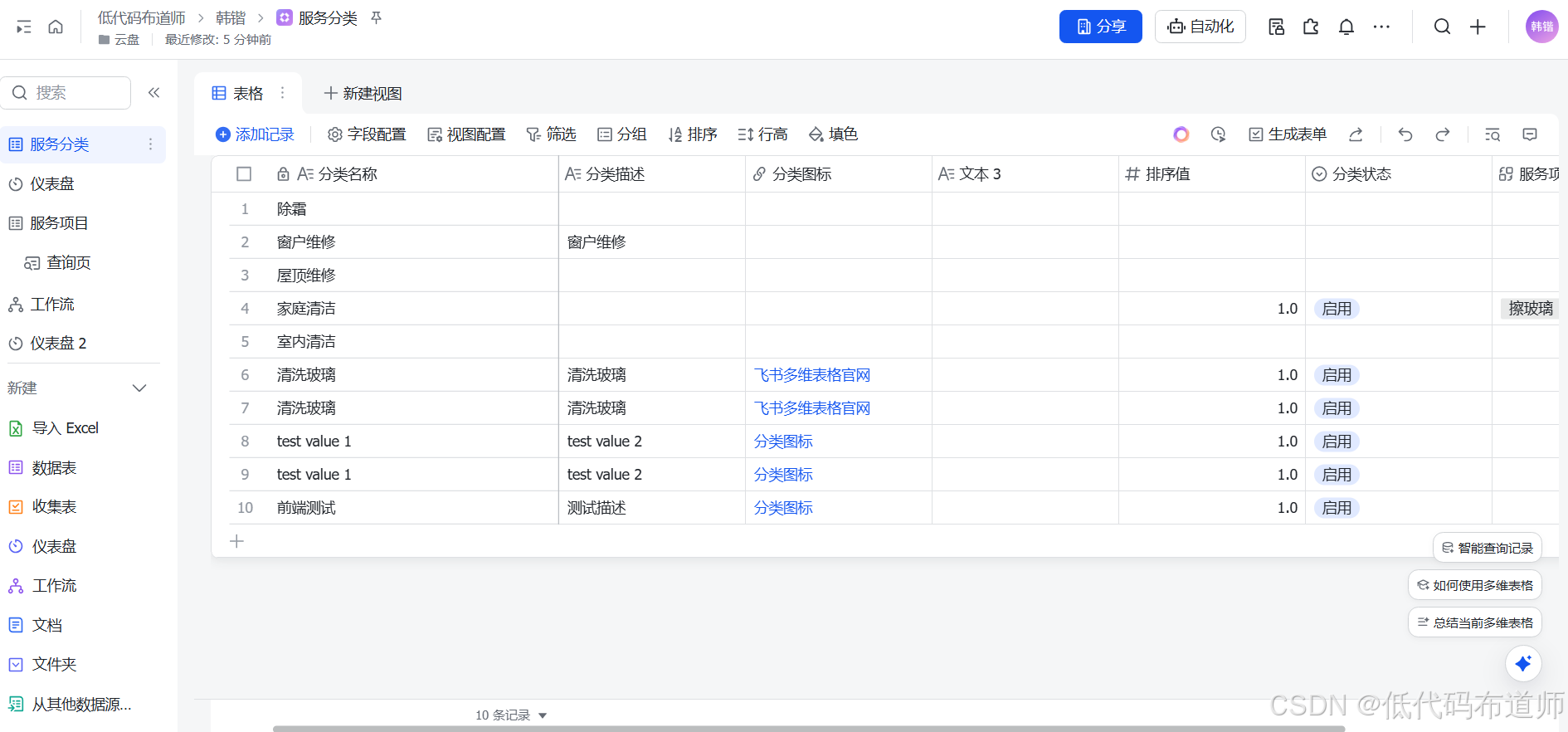
家政维修平台实战09:推送数据到多维表格
目录 1 API调试2 创建云函数3 前端调用整体效果总结 上一篇我们搭建了服务分类的后台功能,对于分类的图标通过集成TOS拿到了可以公开访问的地址,本篇我们将写入的数据推送至多维表格中。 1 API调试
要想推送多维表格的数据,首先要利用官方的…
编程日记
2025/11/28 8:38:45
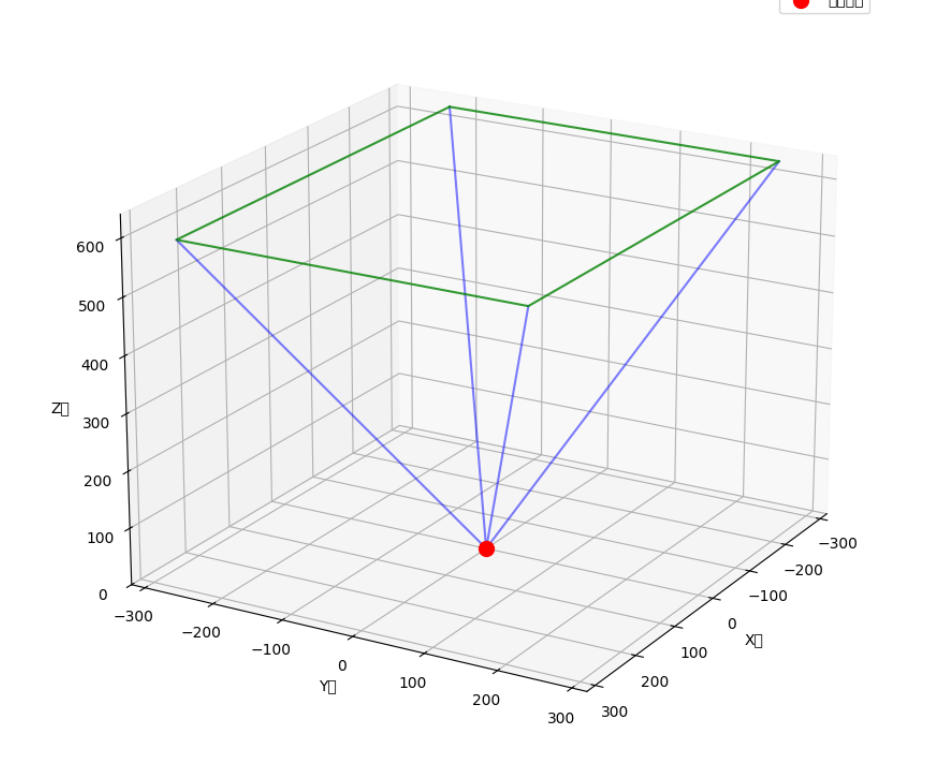
相机内参 opencv
视场角定相机内参
import numpy as np
import cv2
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3Ddef calculate_camera_intrinsics(image_width640, image_height480, fov55, is_horizontalTrue):"""计算相机内参矩阵参数:image_w…
编程日记
2025/11/23 13:39:33
Nockchain项目部署教程
Nockchain头矿窗口正在打开,不拼设备,现在部署,马上就要开挖了。 一、项目介绍
Nockchain 是结合了POW和ZKVM的区块链协议。 主要特点:
1)计算存储新域名空间三位一体架构,高吞吐量
2)使用No…
编程日记
2025/12/23 21:50:49
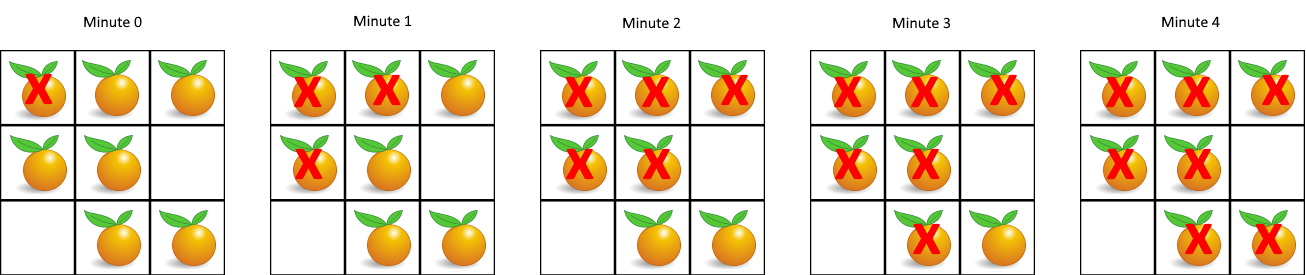
LeetCode-图论-岛屿数量+腐烂的橘子
LeetCode-图论-岛屿数量腐烂的橘子 ✏️ 关于专栏:专栏用于记录 prepare for the coding test。 文章目录 LeetCode-图论-岛屿数量腐烂的橘子📝 岛屿数量🎯题目描述🔍 输入输出示例🧩题目提示🧪AC …
编程日记
2025/12/19 21:32:04

