相关文章
机器人雅克比Jacobian矩阵程序
% 定义机器人的连杆参数
L1 Link(d, 0, a, 0, alpha, pi/2);
L2 Link(d, 0, a, 1, alpha, 0);
L3 Link(d, 0, a, 1, alpha, 0);% 创建机器人对象
robot SerialLink([L1, L2, L3], name, MyRobot);% 设置机器人的关节角度(弧度)
q [0, pi/4, pi/6];%…
编程日记
2026/5/29 5:57:02
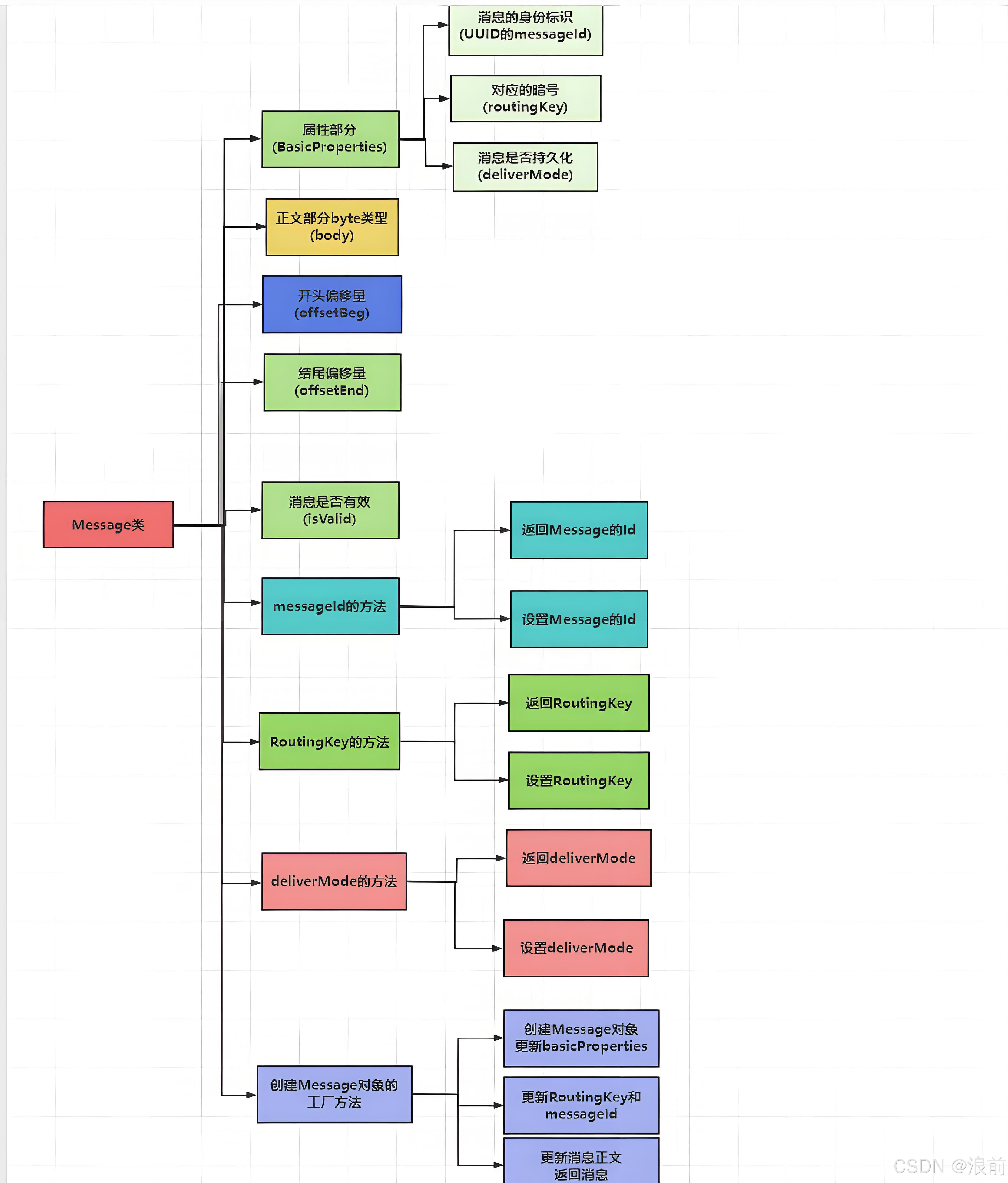
【项目篇】仿照RabbitMQ模拟实现消息队列
大家好呀 我是浪前 项目篇:仿照RabbitMQ模拟实现消息队列
今天是项目的第一篇,我们先来创建出最核心的几个类。 仿照RabbitMQ模拟实现消息队列 创建Exchange类MessageQueue类Binding类Message类1:BasicProperties类2:正文部分3&a…
编程日记
2026/5/31 15:18:51
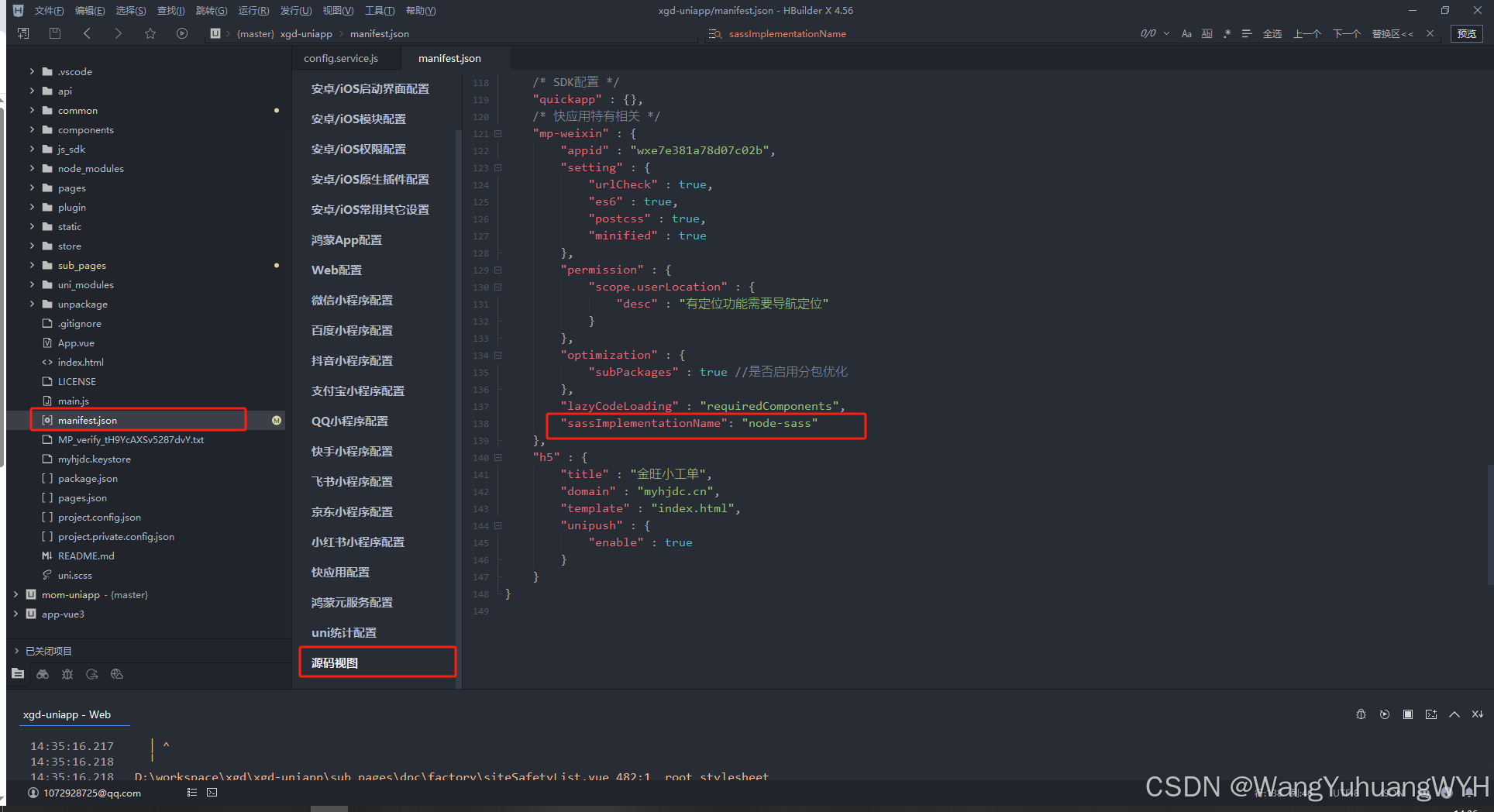
【UniApp】Vue2 scss 预编译器默认已由 node-sass 更换为 dart-sass
从 HBuilderX 4.56 ,vue2 项目也将默认使用 dart-sass 预编译器。 vue2开发者sass预处理注意:
sass的预处理器,早年使用node-sass,也就是vue2最初默认的编译器。
sass官方推出了dart-sass来替代。node-sass已经停维很久了。
另…
编程日记
2026/5/31 8:59:43
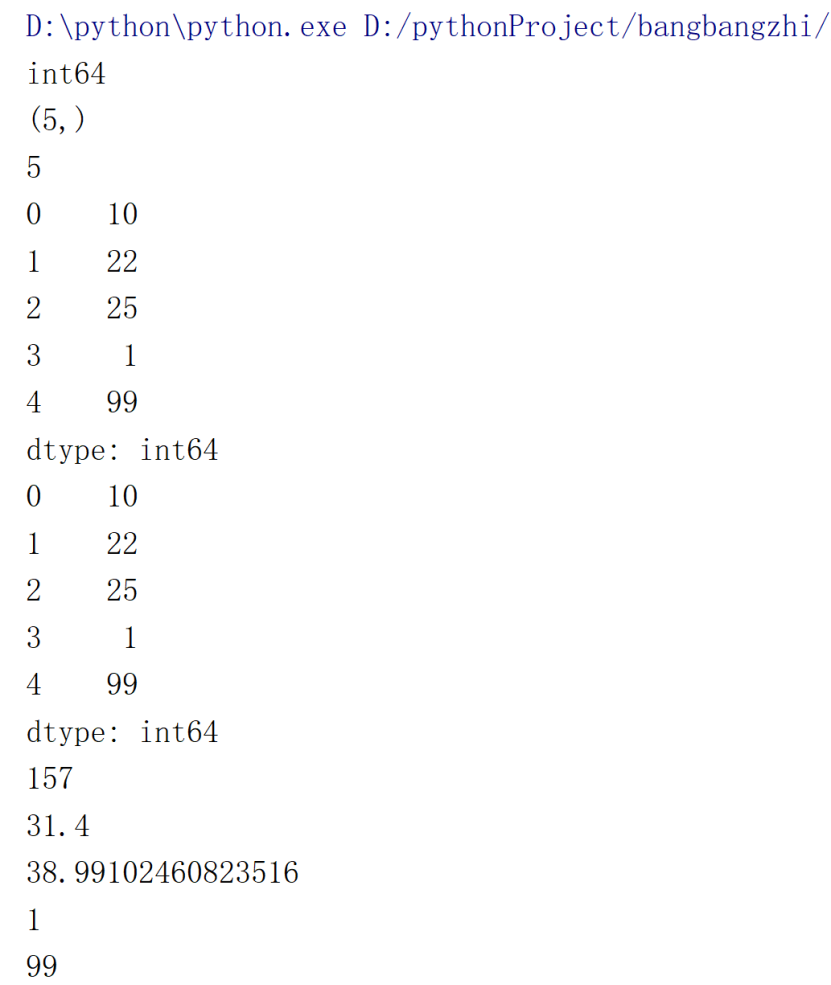
02.Python代码Pandas - Series全系列分享(使用.特点.说明.取值.函数)
02.Python代码Pandas - Series全系列分享(使用.特点.说明.取值.函数)
提示:帮帮志会陆续更新非常多的IT技术知识,希望分享的内容对您有用。本章分享的是pandas的使用语法。前后每一小节的内容是存在的有:学习and理解的关联性,希望…
编程日记
2026/5/31 15:23:16

PHP 8 中的 Swow:高性能纯协程网络通信引擎
一、什么是 Swow?
Swow 是一个高性能的纯协程网络通信引擎,专为 PHP 设计。它结合了最小化的 C 核心和 PHP 代码,旨在提供高性能的网络编程支持。Swow 的核心目标是释放 PHP 在高并发场景下的真正潜力,同时保持代码的简洁和易用性…
编程日记
2026/5/31 15:16:38
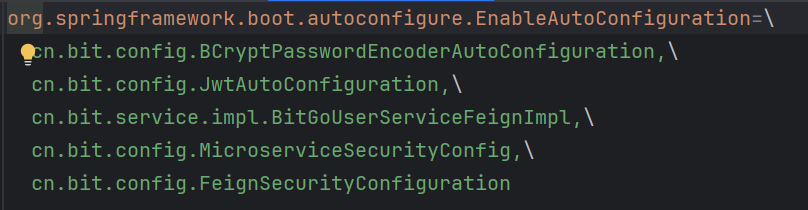
从零搭建微服务项目Pro(第6-2章——微服务鉴权模块SpringSecurity+JWT)
前言: 在上一章已经实现了SpringBoot单服务的鉴权,在导入SpringSecurity的相关依赖,以及使用JWT生成的accessToken和refreshToken能够实现不同Controller乃至同一Controller中不同接口的权限单独校验。上一章链接如下:
从零搭建微服务项目Pr…
编程日记
2026/5/29 23:57:10

详解:中兴新支点操作系统智慧政务信创解决方案
近年来,随着云计算、大数据、AI大模型等新兴技术的蓬勃发展,越来越多的IT软硬件系统在政府领域落地应用,智慧电子政务系统的复杂程度持续攀升。基于保障供应链底层技术架构安全、推动核心技术创新的现实需求,操作系统已成为智慧政…
编程日记
2026/5/24 9:35:54
Shader CGInculde(六)
1.常用的cginc
1.1 HLSLSupport.cginc
编译CGPROGRAM时自动包含此文件,其中声明了很多预处理器宏帮助多平台开发。
1.2 UnityShaderVariables.cginc
编译CGPROGRAM时自动包含此文件,其中声明了很多各种内置的全局变量。
1.3 UnityCG.cginc
需手动添加,其中声明了很多内…
编程日记
2026/5/31 14:26:00

